August 16, 2024/
No Comments
Linkedin Instagram Facebook X-twitter When creating AI for strategic games, the Minmax algorithm is a fundamental tool for making decisions…
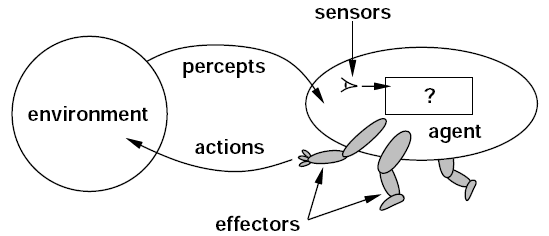
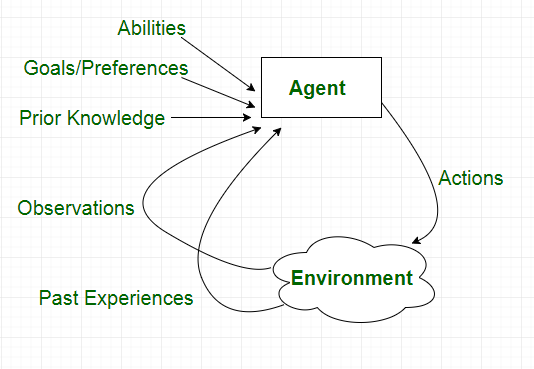
In artificial intelligence, a knowledge-based agent is a system that utilizes a knowledge base to make informed decisions. The agent reasons about the world and acts upon it, based on what it knows and what it perceives. In this blog, we will explore how to design a knowledge-based agent to solve a robot navigation problem using logical inference.
Consider a simple grid-based environment where a robot must navigate from a start position to a goal position. The grid contains obstacles that the robot must avoid. The robot is equipped with sensors that provide information about its surroundings, such as the presence of obstacles in adjacent cells.
The goal is to build a knowledge-based agent that can successfully navigate the grid from the start to the goal, avoiding obstacles, by reasoning about the environment based on its sensory inputs.
The PEAS framework (Performance measure, Environment, Actuators, Sensors) is a common way to define the characteristics and requirements of an intelligent agent in AI. Applying the PEAS framework to the robot navigation problem in your blog post would look like this:
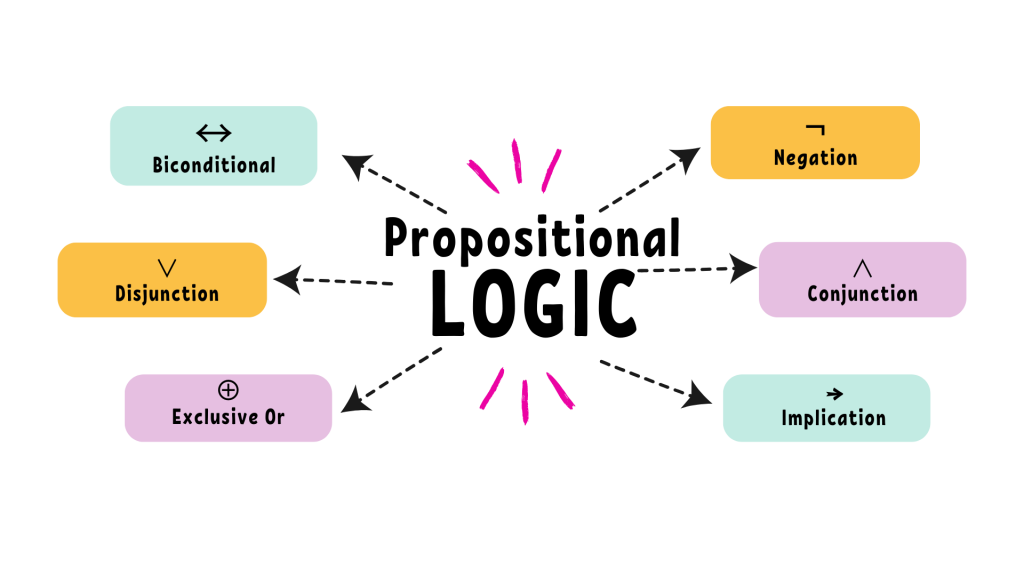
To represent the knowledge, we will use propositional logic. Each cell in the grid is denoted as \(C_{i,j}\), where i and j are the row and column indices, respectively. The robot perceives the environment through its sensors, which can detect if adjacent cells are free (no obstacle) or blocked (obstacle present).
We can represent the knowledge as:
The robot’s knowledge base (KB) includes the following rules:
The robot will use logical inference to decide its next move. For example, if the robot is at \(C_{2,2}\) and perceives that \(F_{2,3}\) and \(F_{3,2}\) are true, it infers that moving to \(C_{2,3}\) or \(C_{3,2}\) is safe.
Here’s how the agent can infer its actions:
Let’s consider a 3×3 grid where the robot starts at \(C_{1,1}\) and the goal is at \(C_{3,3}\). Obstacles are present at \(C_{1,2}\) and \(C_{2,3}\).
This process continues until the robot reaches the goal or determines that no safe path exists.
class Robot:
def __init__(self, grid):
self.grid = grid # 2D grid where 0 is free and 1 is an obstacle
self.kb = {}def perceive(self, x, y):
"""Perceive the surrounding cells and update the KB."""
self.kb[(x, y)] = 'Free' if self.grid[x][y] == 0 else 'Blocked'
return self.kb[(x, y)]
def infer_and_move(self, x, y): """Infer the next move based on the KB."""
moves = [(x+1, y), (x-1, y), (x, y+1), (x, y-1)]for move in moves:
nx, ny = move
if 0 <= nx < len(self.grid) and 0 <= ny < len(self.grid[0]):status = self.perceive(nx, ny)
if status == 'Free':
print(f"Moving to {nx, ny}")
return nx, ny
print("No safe move available!")
return None, None# Example Grid (3x3)
# 0 = Free, 1 = Obstacle
grid = [
[0, 1, 0],
[0, 0, 1],
[0, 0, 0]
]robot = Robot(grid)
x, y = 0, 0 # Start position
while (x, y) != (2, 2):
x, y = robot.infer_and_move(x, y)
if (x, y) is None:
break
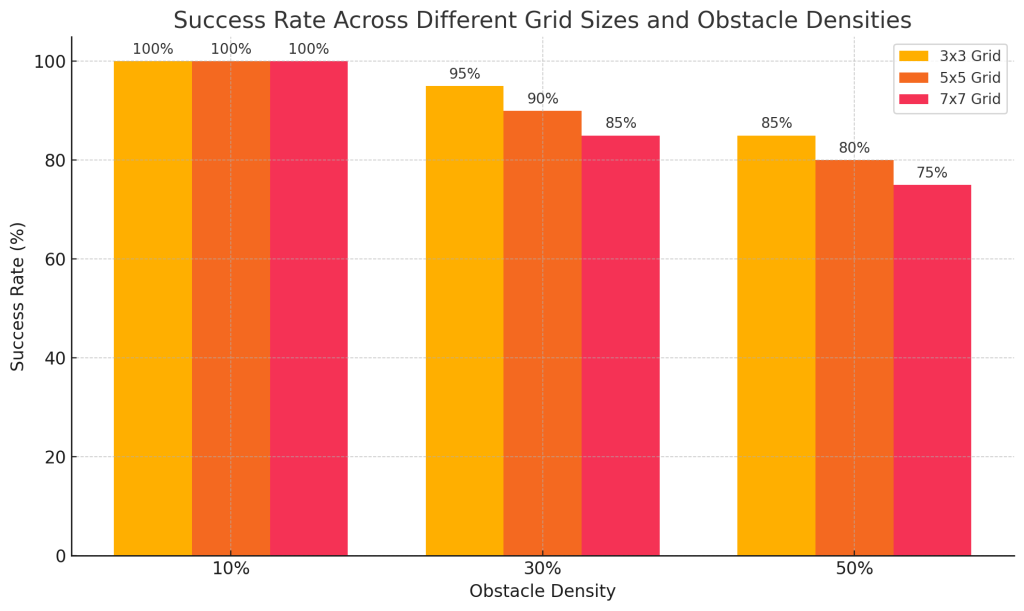
To thoroughly evaluate the performance of the knowledge-based agent in navigating a grid-based environment, we conducted simulations on various grid configurations. The analysis focuses on key metrics such as success rate, average steps taken, computation time, and path optimality.
The agent was tested on a range of grid sizes, primarily focusing on 3×3, 5×5, and 7×7 grids. Each grid contained obstacles placed randomly with varying densities. For each configuration, the agent was tasked with navigating from a fixed start position to a goal position while avoiding obstacles. The performance was evaluated across multiple trials for each grid configuration.
|
Grid Size
|
Obstacle Density
|
Success Rate
|
Average Steps
|
Computation Time (s)
|
Path Optimality
|
|---|---|---|---|---|---|
Explanation:
This chart illustrates how the success rate diminishes as both grid size and obstacle density increase. It also highlights the agent’s robustness in simpler environments and its adaptability as the complexity of the navigation task grows.
The performance analysis demonstrates that the knowledge-based agent is highly effective in navigating simpler and moderately complex environments. However, as the grid size and obstacle density increase, the agent’s success rate and path optimality decrease, and the computation time rises. These results provide valuable insights into the agent’s strengths and limitations, offering a clear direction for future improvements in complex scenarios.
Knowledge-based agents are powerful tools in AI for making decisions based on logical reasoning. By applying logical inference to a well-structured knowledge base, such agents can solve complex problems like robot navigation efficiently. The key lies in accurately modeling the environment and deriving rules that the agent can use to infer safe actions.
As Tech Co-Founder at Yugensys, I’m passionate about fostering innovation and propelling technological progress. By harnessing the power of cutting-edge solutions, I lead our team in delivering transformative IT services and Outsourced Product Development. My expertise lies in leveraging technology to empower businesses and ensure their success within the dynamic digital landscape.
Looking to augment your software engineering team with a team dedicated to impactful solutions and continuous advancement, feel free to connect with me. Yugensys can be your trusted partner in navigating the ever-evolving technological landscape.
Linkedin Instagram Facebook X-twitter When creating AI for strategic games, the Minmax algorithm is a fundamental tool for making decisions…
Linkedin Instagram Facebook X-twitter Introduction Ant Colony Optimization (ACO) is a popular nature-inspired algorithm designed to solve complex optimization problems.…
Linkedin Instagram Facebook X-twitter Introduction Genetic Algorithms (GAs) are designed to tackle complex optimization problems that traditional methods may struggle…
Linkedin Instagram Facebook X-twitter Heuristic functions are essential tools in artificial intelligence (AI) and cognitive psychology, designed to simplify complex…